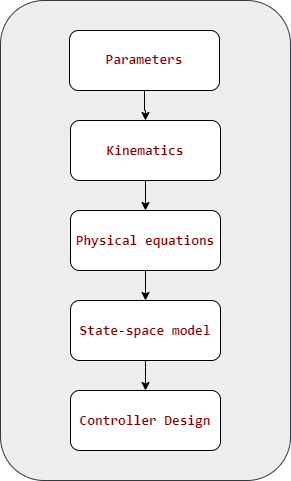
Modeling
Work Order
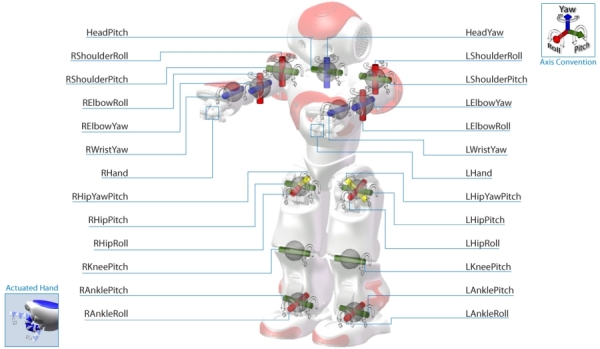
Joints to model
| Joint Name | Parameters | Forward Kinematics | Inverse Kinematics | Physical Equation | State-space Model | Controller |
|---|---|---|---|---|---|---|
| Head | ✅ | ✅ | ✅ | ✅ | ✅ | ✅ |
| ArmShoulder | ❌ | ❌ | ❌ | ❌ | ❌ | ❌ |
| ArmElbow | ❌ | ❌ | ❌ | ❌ | ❌ | ❌ |
| LegHip (Supported) | ❌ | ❌ | ❌ | ❌ | ❌ | ❌ |
| LegKnee (Supported) | ❌ | ❌ | ❌ | ❌ | ❌ | ❌ |
| LegAnkle (Supported) | ❌ | ❌ | ❌ | ❌ | ❌ | ❌ |
| LegHip (Floating) | ❌ | ❌ | ❌ | ❌ | ❌ | ❌ |
| LegKnee (Floating) | ❌ | ❌ | ❌ | ❌ | ❌ | ❌ |
| LegAnkle (Floating) | ❌ | ❌ | ❌ | ❌ | ❌ | ❌ |
For example, in the picture below, the right leg is supported, and the left leg is floating.